Learning Theory
- 如何形式化机器学习问题
- 问题 “learnable” 是什么含义
- 如何建立学习算法
Introduction to generalization
Aim: 收集数据 -> (训练)模型 -> (预测)未知数据
模型应该 fit unknown data
胡克定律 -> 用 simple model 去 fit data,but not simpler -> simple and fit well for unknown data
奥卡姆剃刀 -> 在所有 hypotheses 中,选择假设最少的那种
Probability Theory
Markov’s inequality
Chebyshev’s inequality
大数定律
- $n \rightarrow \infty$,$X_{n} \rightarrow p$
- concentration property
- Q:收敛速度有多快?
切比雪夫大数定律,$O(\frac{1}{n})$ 的速度收敛
中心极限定理:描述均值 $X_{n}$
Concentration Inequality: provide bounds on how a random variable deviates from some value
Chernoff Bound:
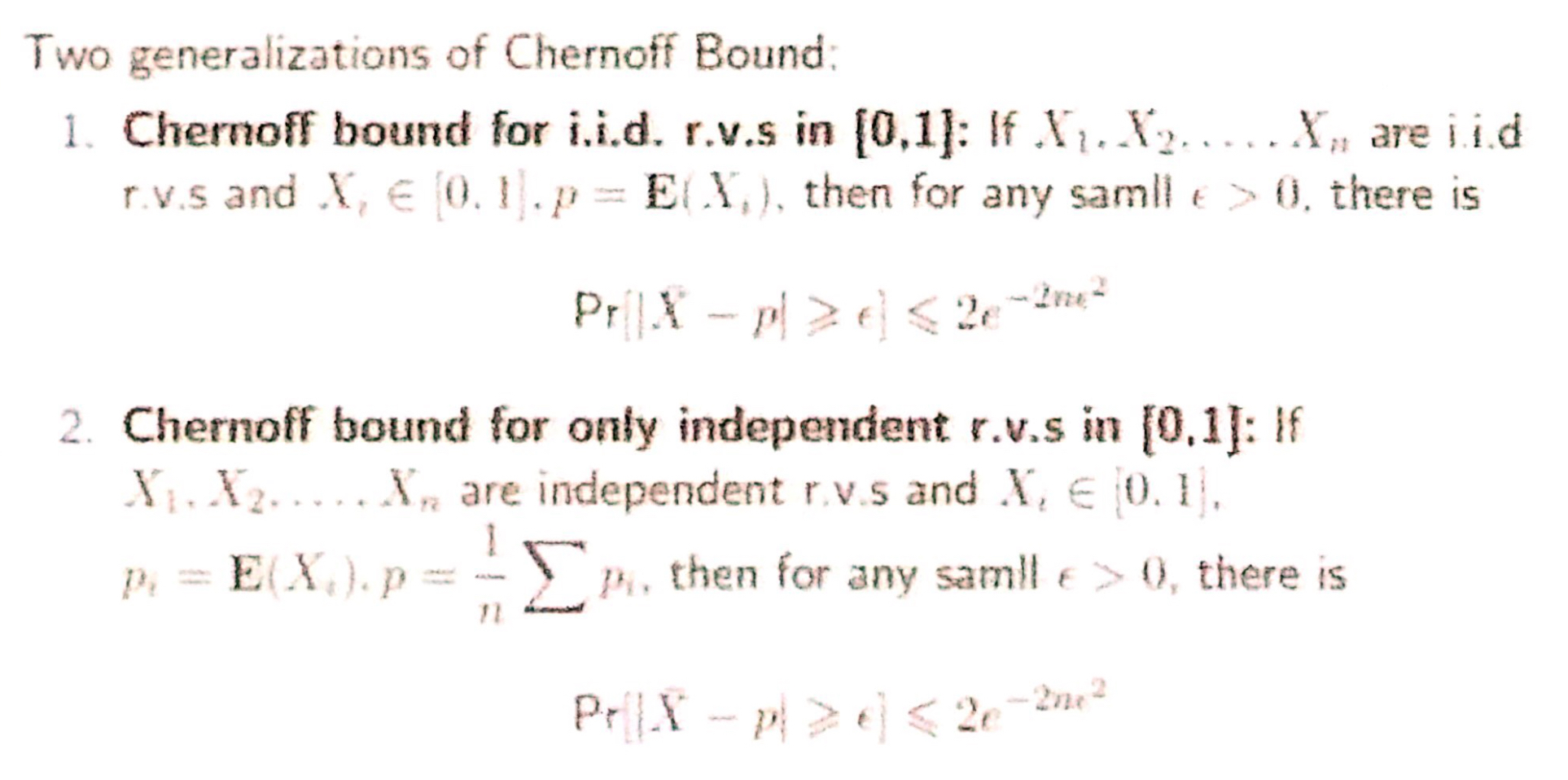
Other Bounds:
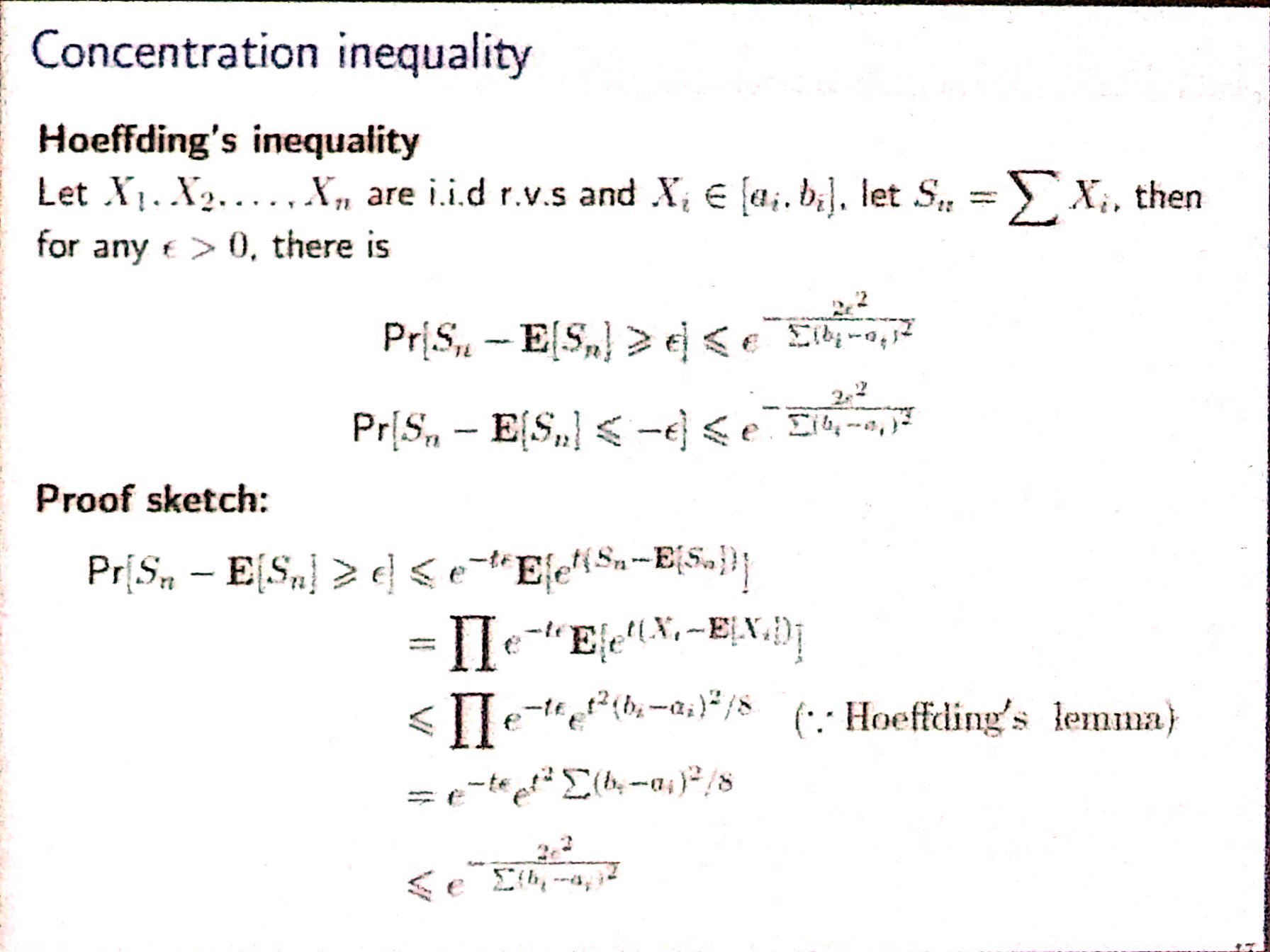
结论:这些不等式都得到了随着数据点数 n 的增长,均值以 $O(e^{-n})$ 的速度收敛于期望
VC Theory
Basic Notation
Input/Feature space: $\mathcal{X}$
Output/Label space: $\mathcal{Y}$
concept $\mathcal{c} : \mathcal{X} \rightarrow \mathcal{Y}$
concept class: $\mathcal{C}$
数据点 $\mathcal{x}$ 以分布 $\mathcal{D}$ 从 $\mathcal{X}$ 中生成
Loss: $\mathcal{l} : \mathcal{Y} \times \mathcal{Y} \rightarrow \mathbb{R}$
hypothesis: $\mathcal{h} \in \mathcal{H}$
简单举例理解一下,一类神经模型架构可以理解为限定的假设空间 H ,而某个特定参数的该神经模型即是 h,训练的过程可以看作是在假设空间 H 中不断的寻找最优模型 h 的过程。
Generalization and empirical error
- generalization error
机器学习理论需要研究的是 generalization error
- empirical error
注:这里我其实有点不懂,我查到的泛化误差的定义,
与这里不符。按照维基的解释,这里的泛化误差公式实际上应该是期望误差(expected error),而真正的泛化误差 = 期望误差 - 经验误差。
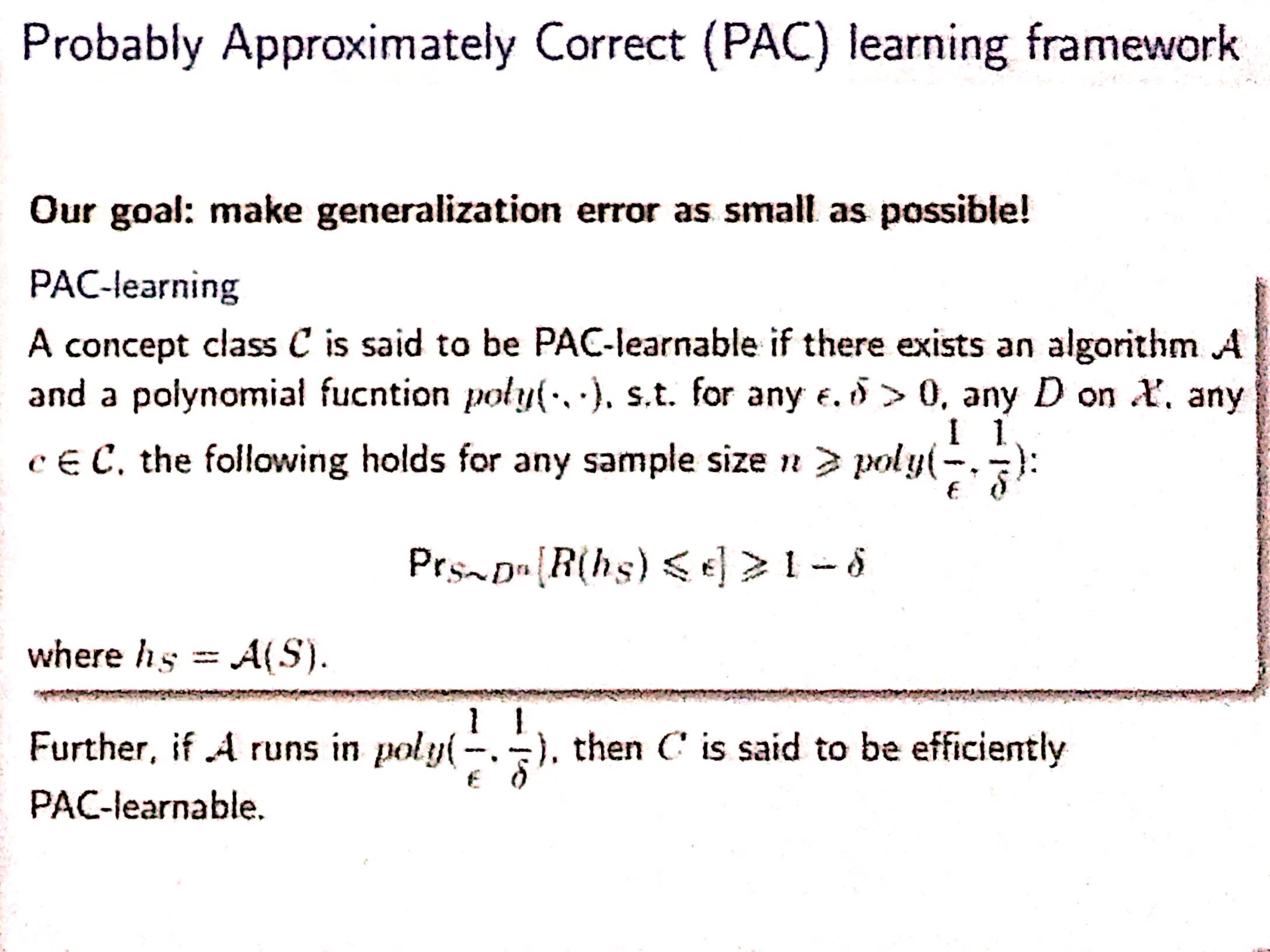
Probably Approximately Correct(PAC)learning
Goal: generalization error as small as possible
with high probability (the “probably” part), the selected function will have low generalization error (the “approximately correct” part) — from Wikipedia
Uniform Generalization
在具体实验中,我们的模型 $\mathcal{h}$ 是从假设空间 $\mathcal{H}$ 中挑选出来的,那我们应该挑选怎样的 $\mathcal{h}$ 呢。注意在训练的时候,我们只有训练数据集 $\mathcal{S}$ 可以使用。由于我们不清楚真实分布 $\mathcal{D}$ 是怎样的,因此没法得到泛化误差 $R(h)$。
一个直观的近似是训练集的经验误差 $\tilde{R}_{S}(h)$ ,按照 2. 中的论述,$\tilde{R}_{S}(h)$ 应该能以很快的速度逼近 $R(h)$。
然而实际实验中我们观察到的并不是这样,在简单的数据集上,我们可以轻易的训练到 $\tilde{R}_{S}(h) = 0$ ,但此时在测试集上的表现非常差。问题出在我们在选择 $\mathcal{h}$ 时,考虑了训练数据集 $\mathcal{S}$,因此不满足 2. 中独立性的要求。
换个角度理解,如果在训练之前就固定了一个 $\mathcal{h}$(也就是参数都锁死不变),那么训练过后该 $\mathcal{h}$ 也依然是原样,没有用到任何训练集 $\mathcal{S}$ 的信息,那么此时就可以应用之前的公式,显然有 $\tilde{R}_{S}(h) \rightarrow R(h), n\rightarrow \infty$
出于这样的原因,我们不考虑某个 $\mathcal{h}$ 的泛化误差,而是转而考虑所有 $\mathcal{h}$ 的泛化误差的 bound,也就是考虑对整个假设空间 $\mathcal{H}$的泛化性描述,称作 Uniform Generalization。我的理解就是,直接考虑模型架构本身的泛化性能,与参数设定无关。
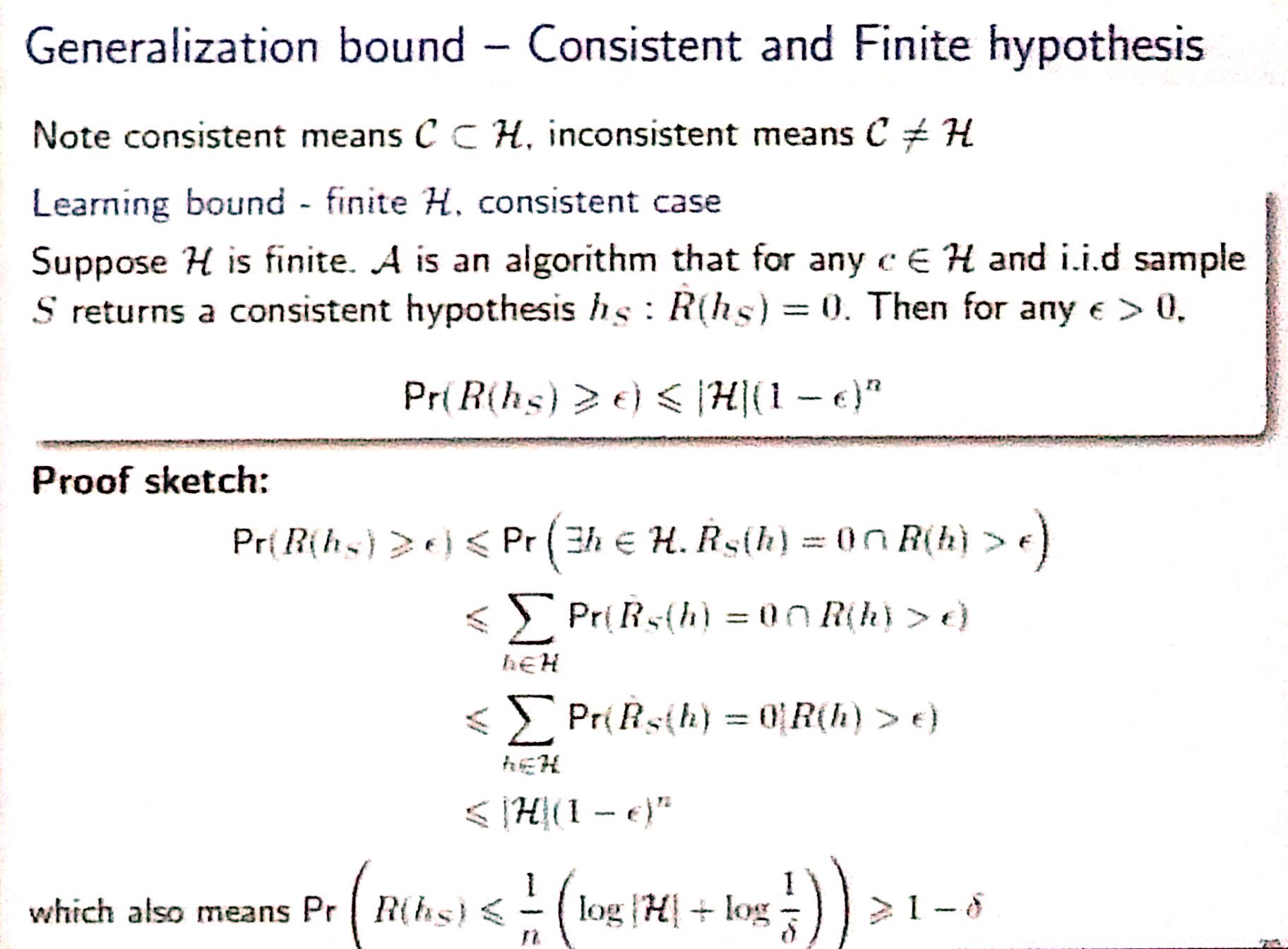
对有限的 consistent 的 H
consistent 的意思是 H 能够包容 C
对有限的 inconsistent 的 H
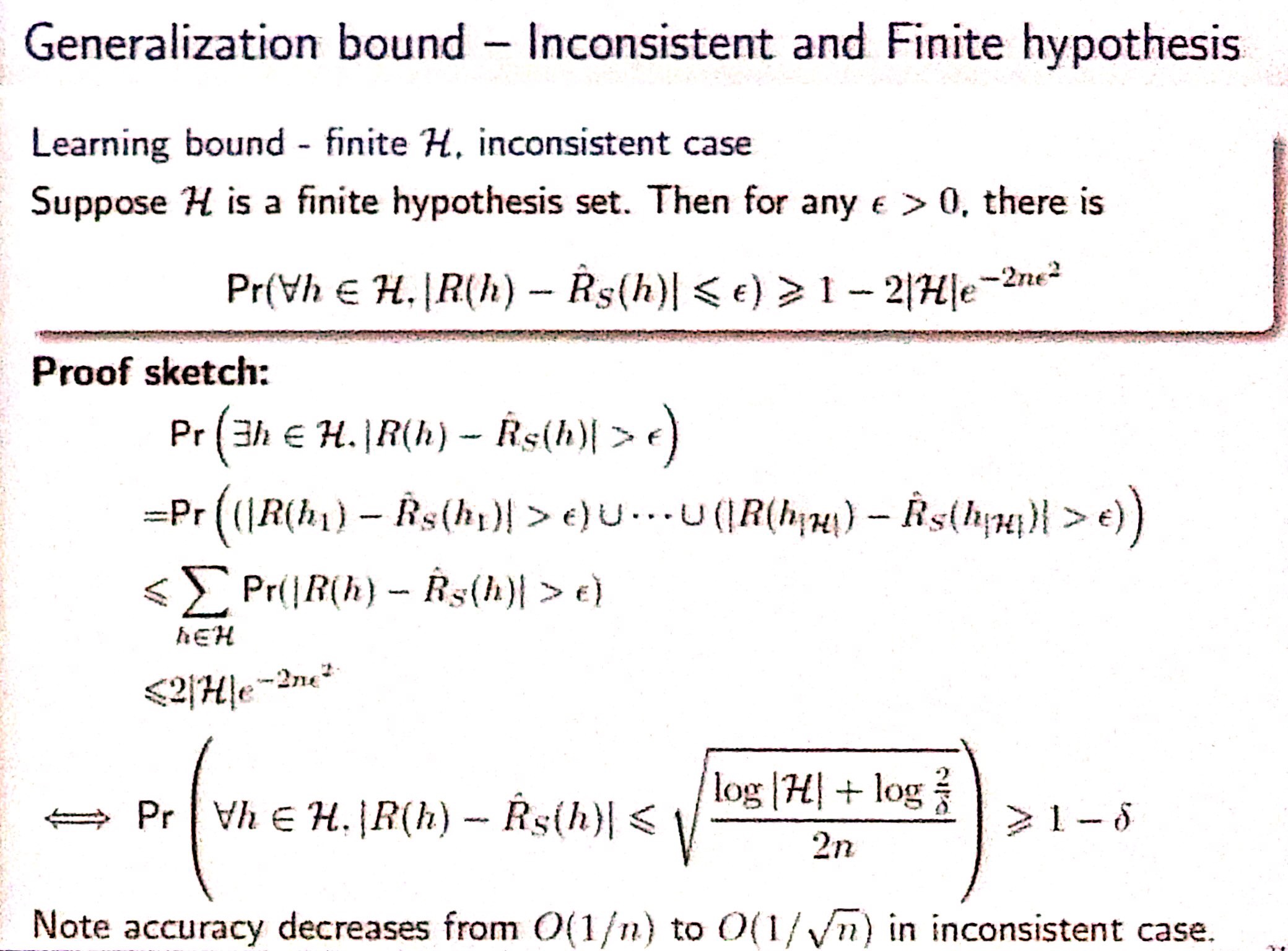
结论:对有限的 $\mathcal{H}$,$\mathcal{H}$ 的大小以及训练数据 n 的大小决定了其 generation bound
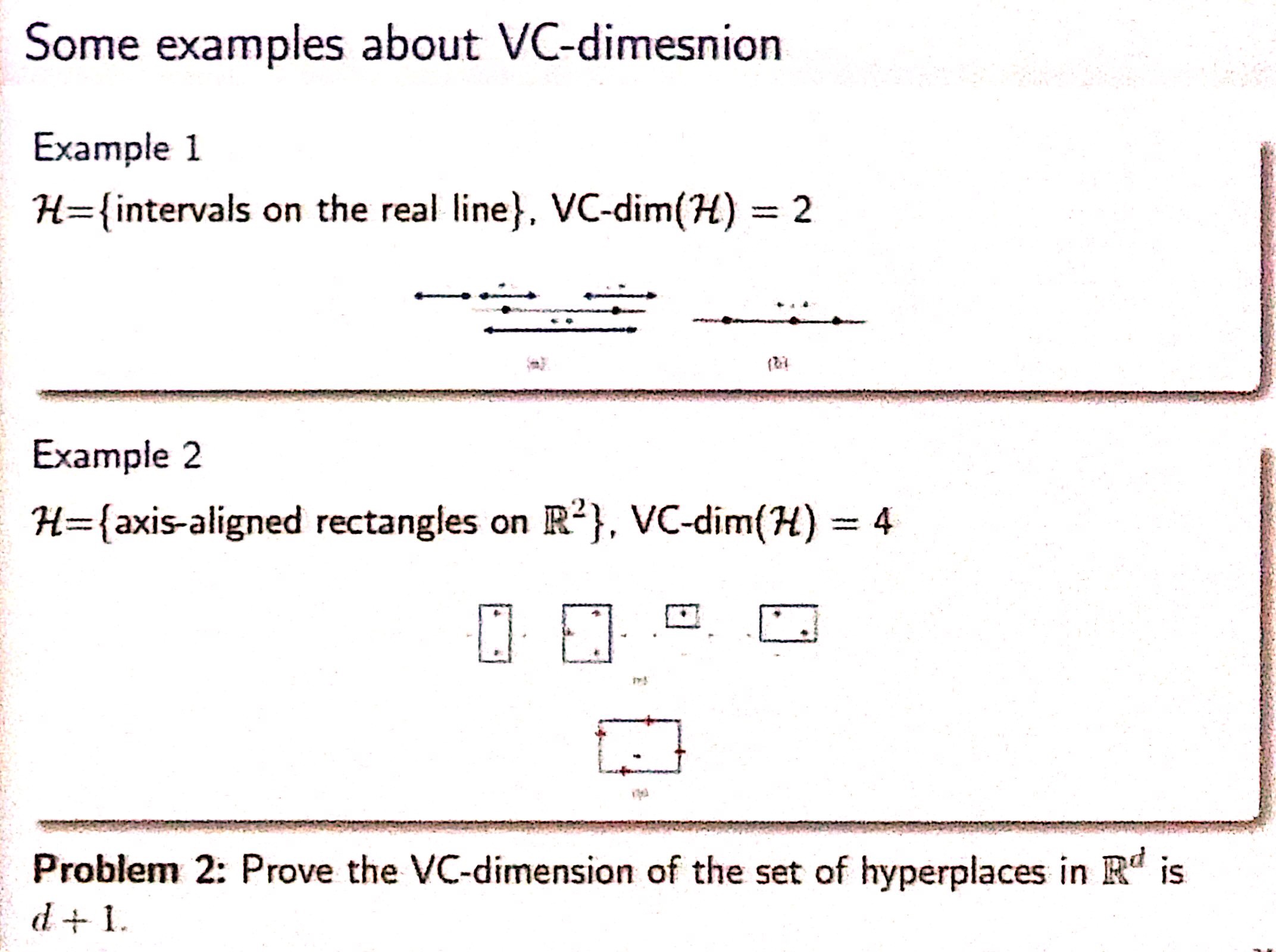
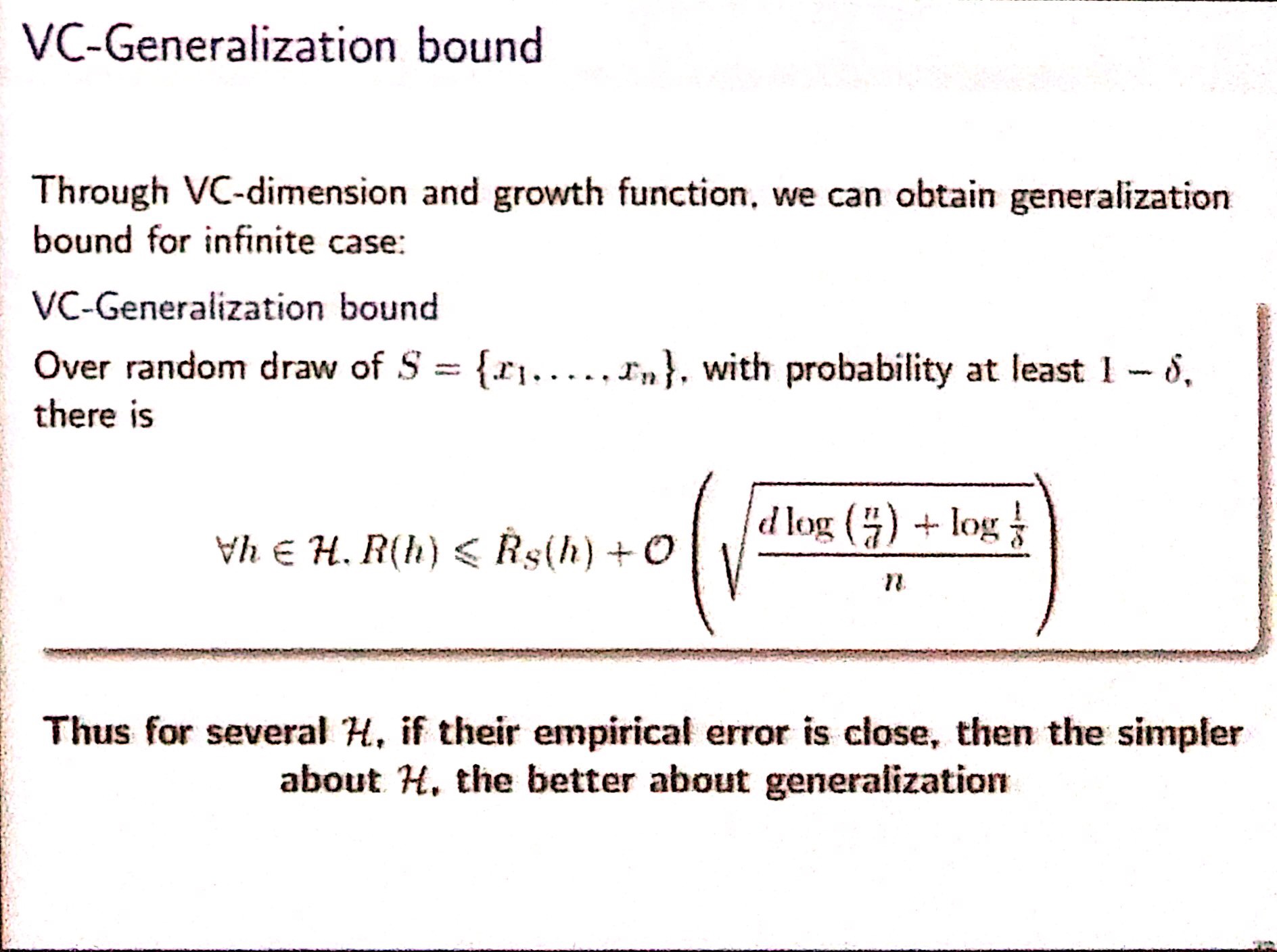
对无限的 H
使用 VC维 来描述 $\mathcal{H}$ 的复杂程度

举例如下
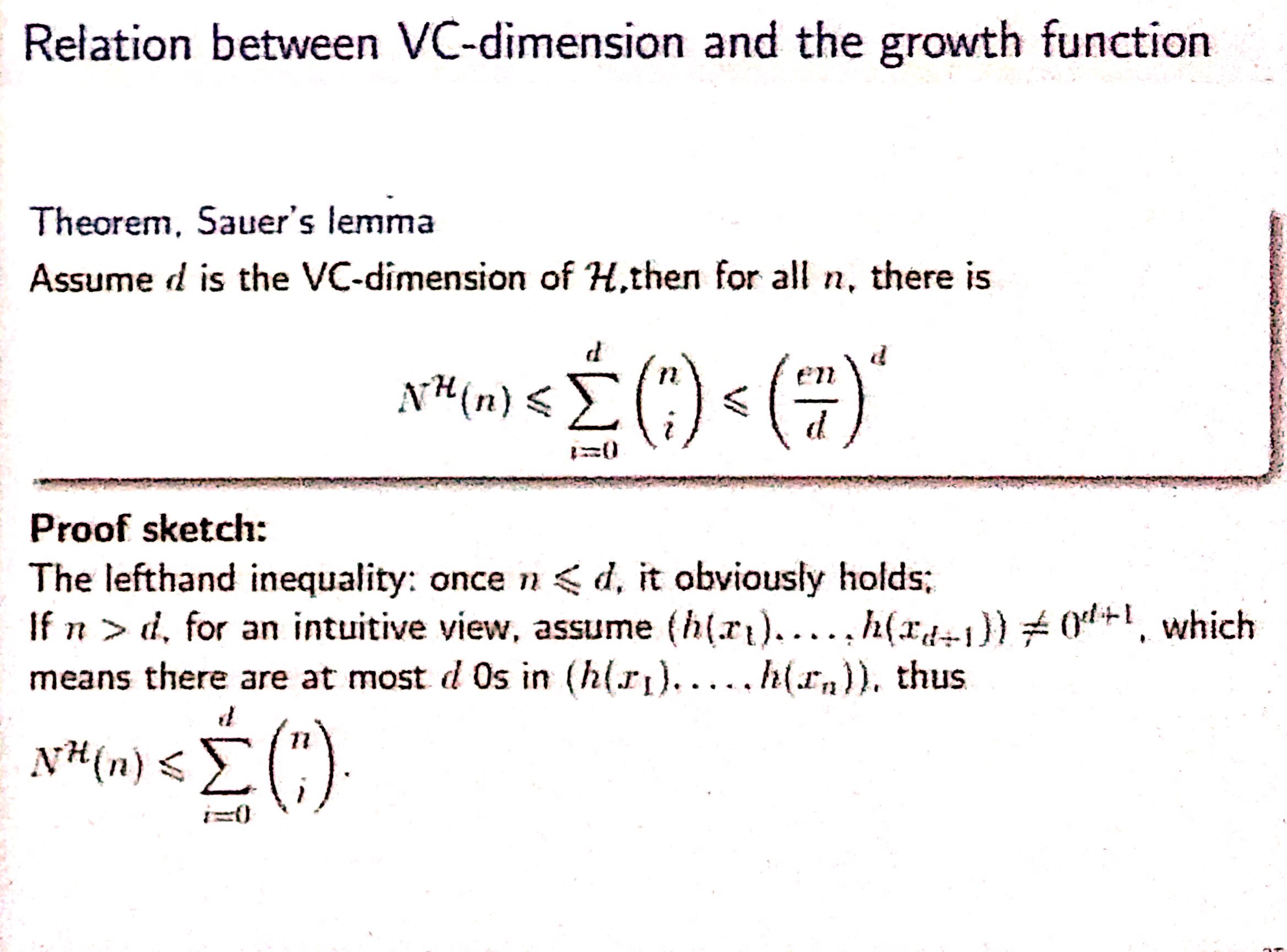
在 d = VC维 之前,以 $2^{n}$ 增长,之后以多项式增长
有了 VC维 ,我们能够对 generalization error 进行 bound
讨论:GD 比 SGD 效果要差,它可以学到非常好的 training error,但泛化很差
如果想要好的 generalization ,模型一定不能太复杂
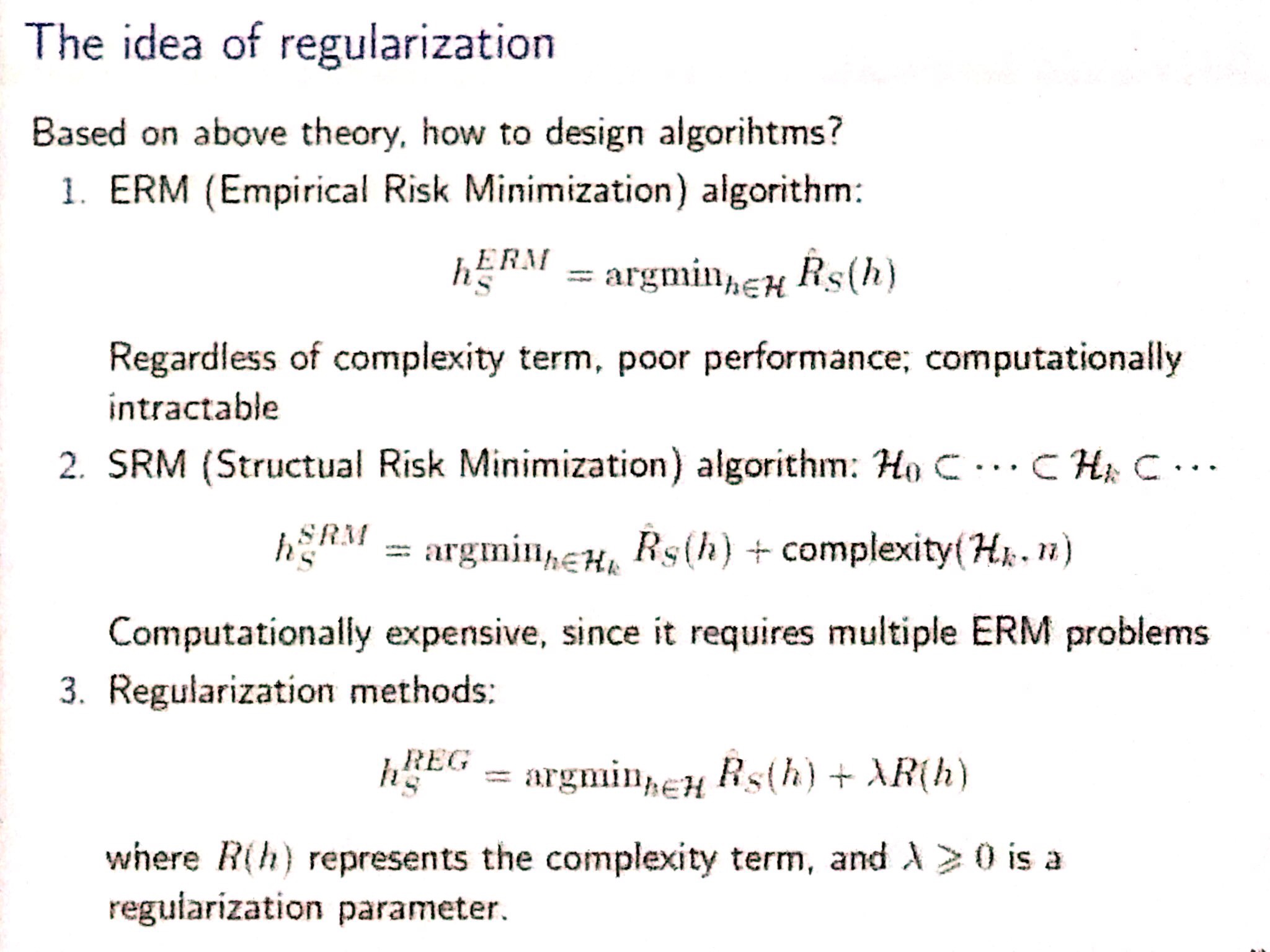
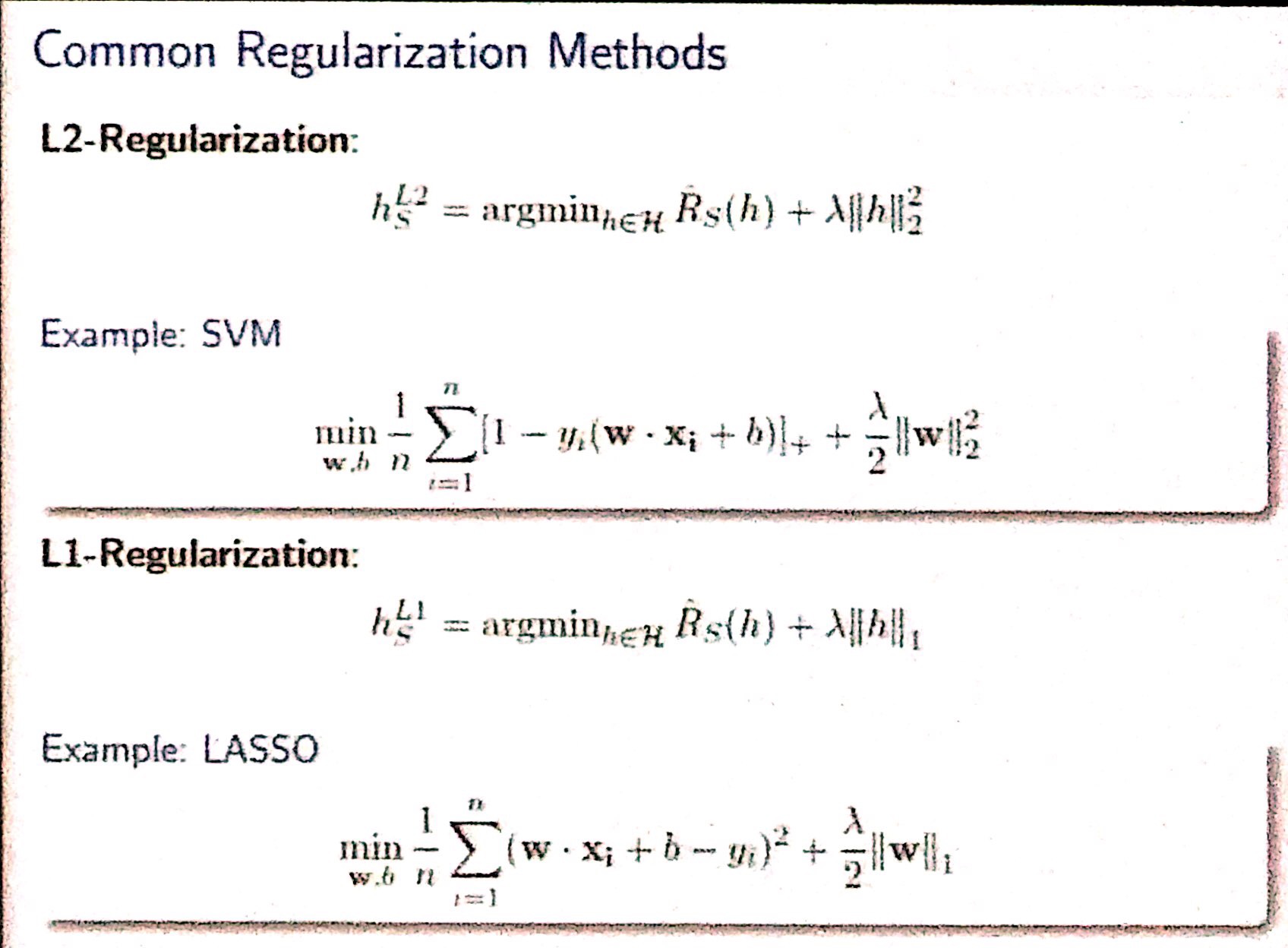
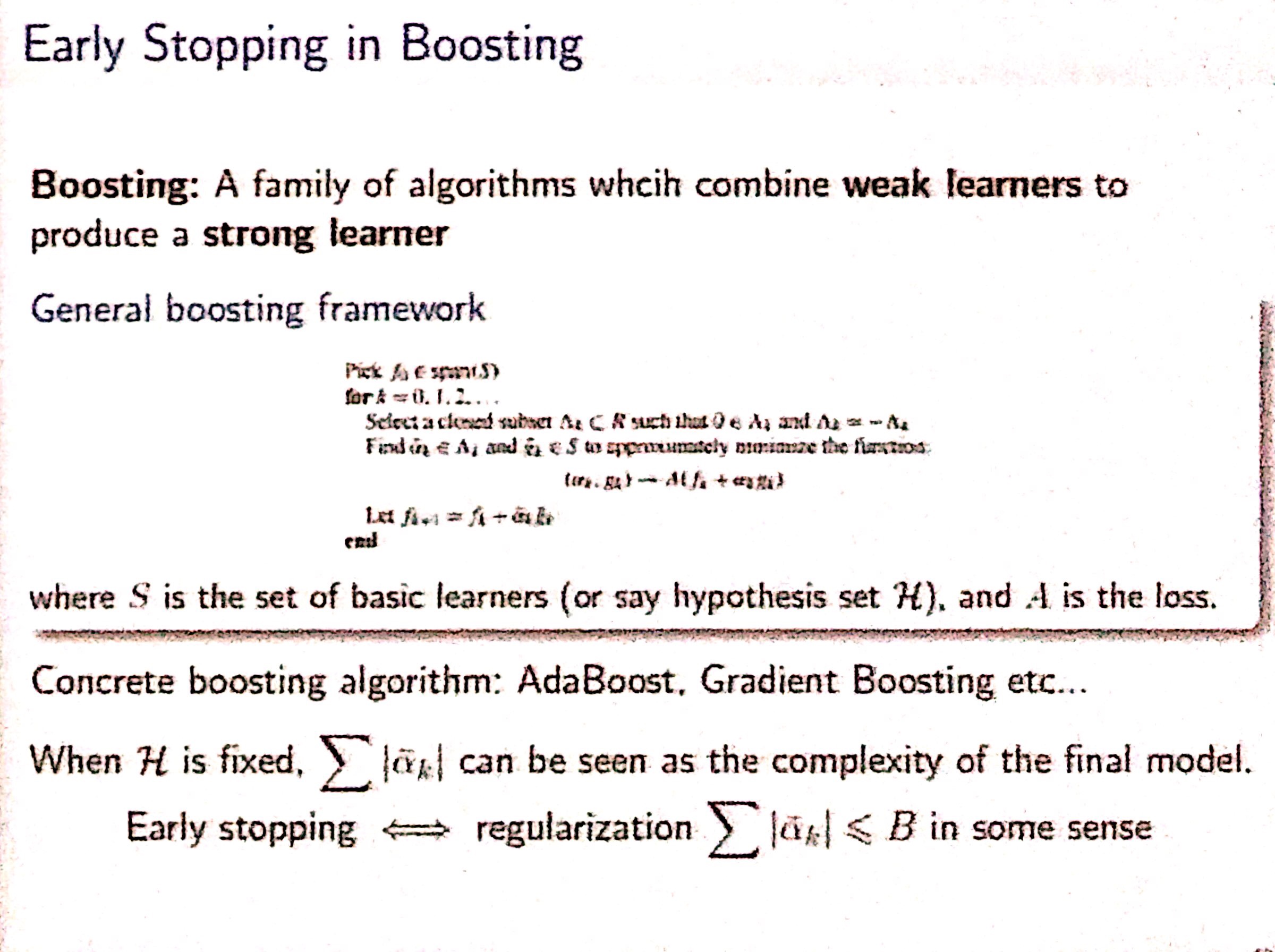
Regularization
基于上述思想,我们需要对模型进行约束,使得其 $\mathcal{H}$ 不能太过于复杂
PAC-Bayes
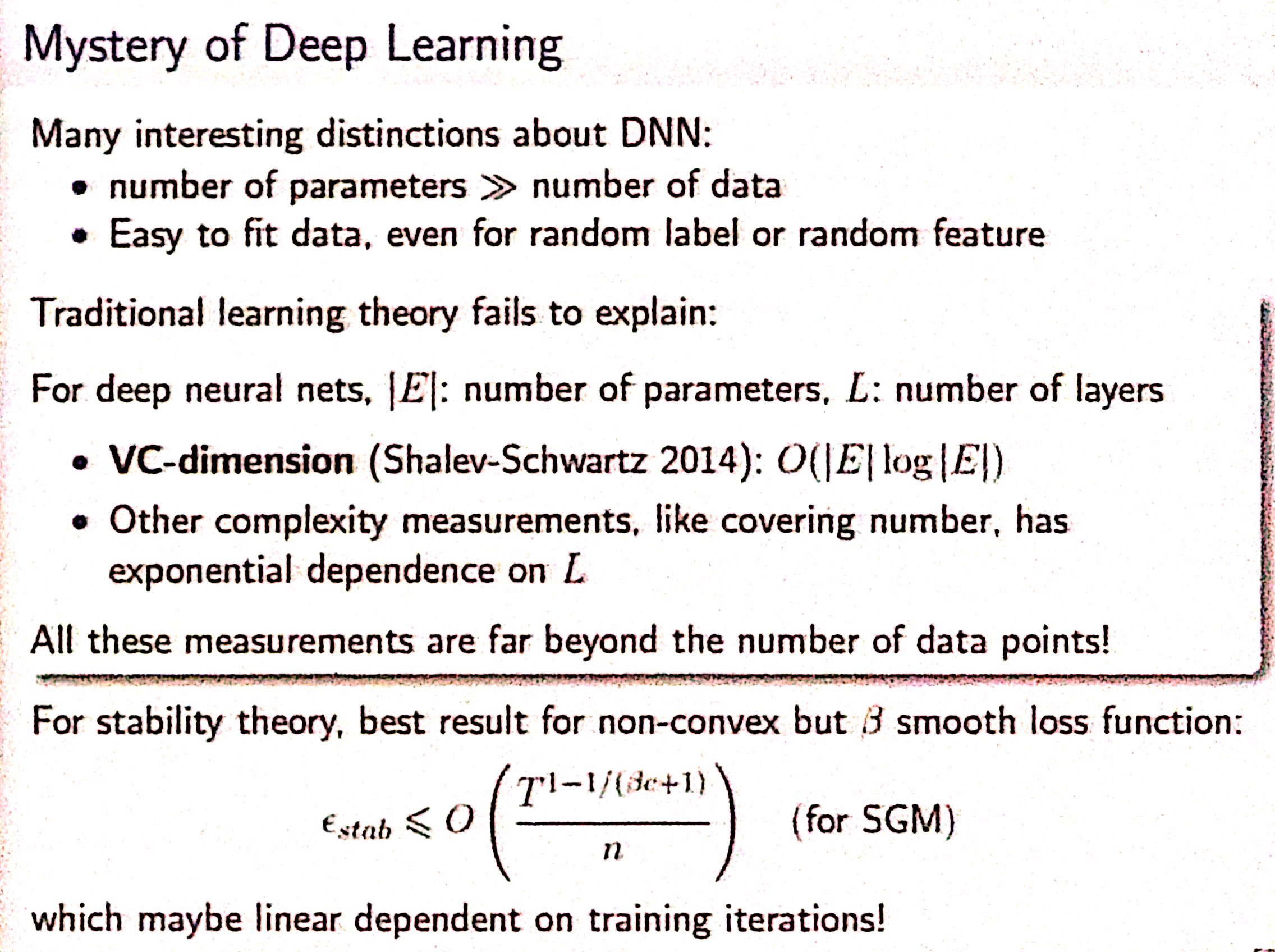
对 DNN 来说,VC Theory 有很大的问题,其 Upper bound > 1 (后面的一项中 d >> n)
因此需要思考其他可能能解决 DNN 泛化性的方法,比如从贝叶斯学派给出泛化性描述
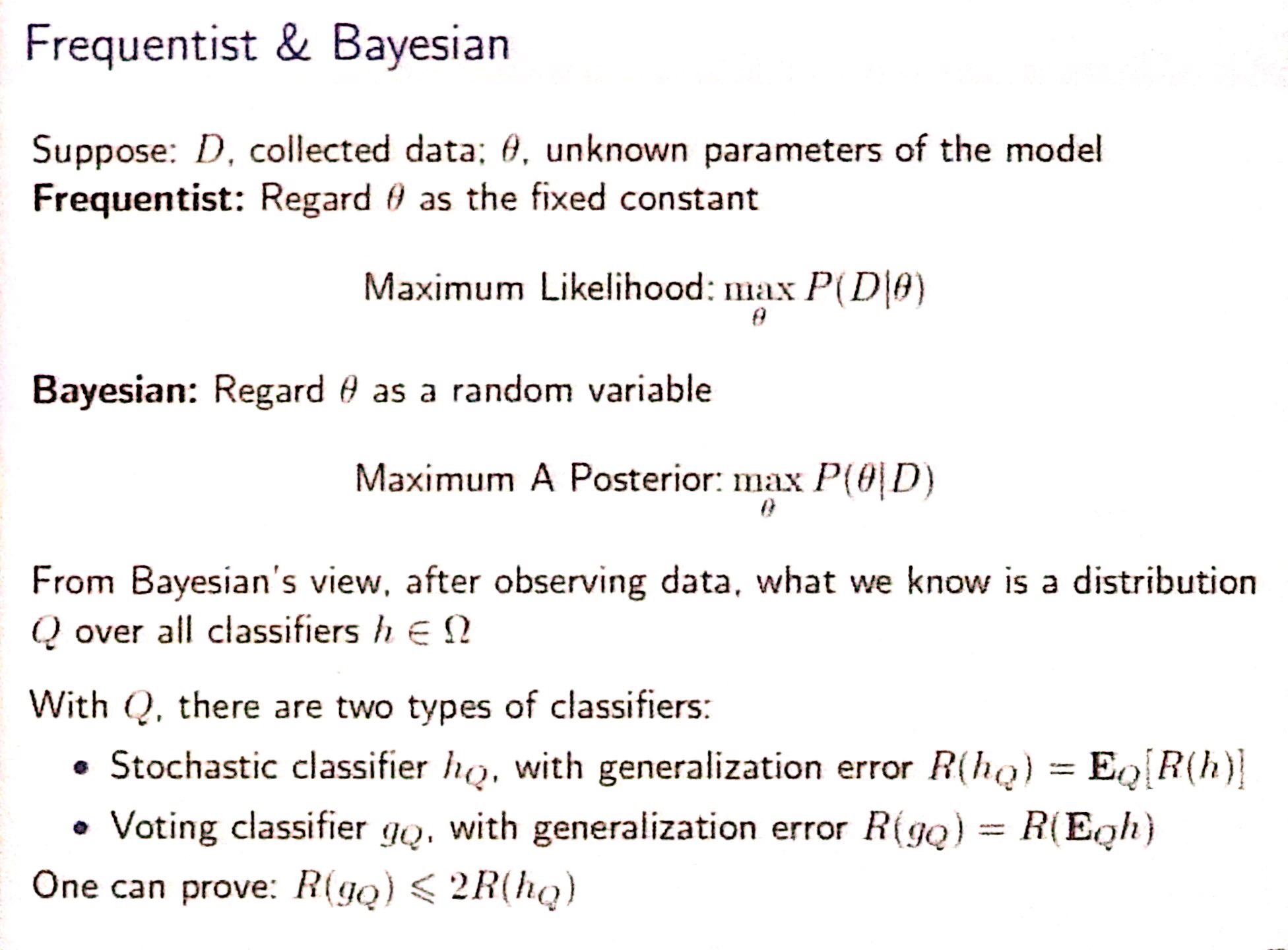
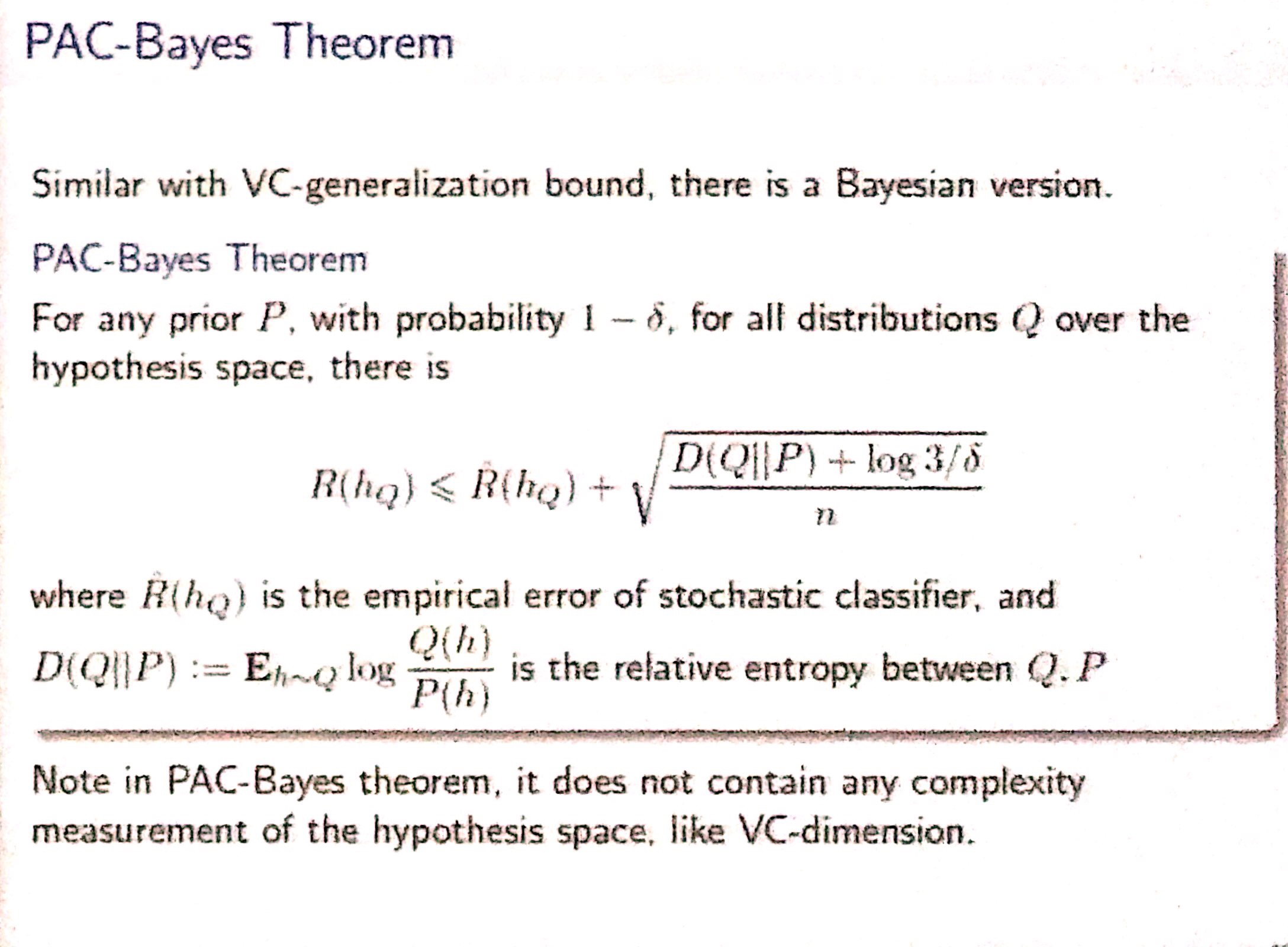
结论:对于学习前的先验 $P$ 和观察了数据点之后的后验 $Q$,如果 $P$ 和 $Q$ 差距不大,则我们认为经验误差能比较好的反应泛化误差
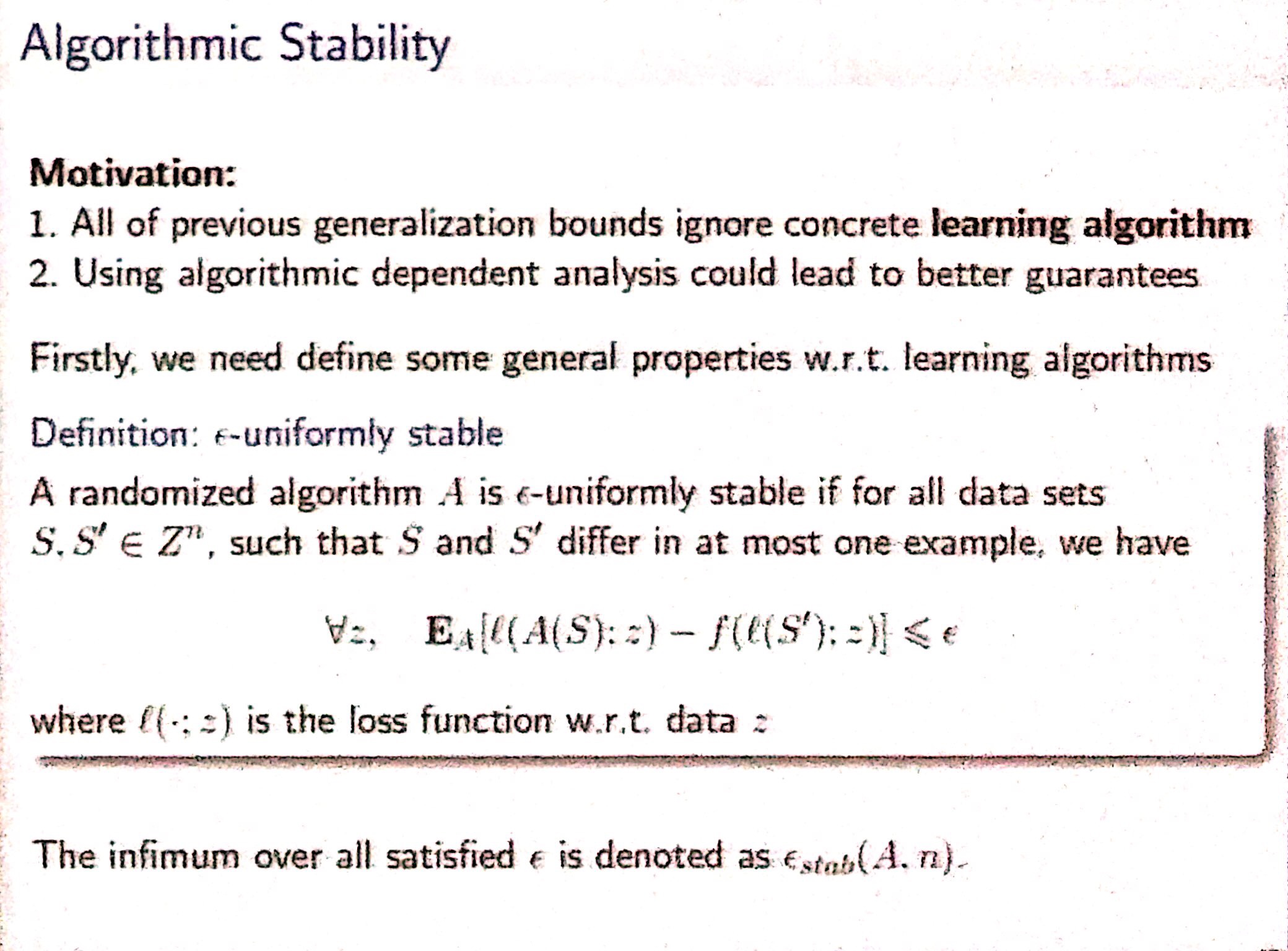
Algorithmic Stability
从具体学习算法的方向去证明 generalization bound
Defination
度量只换一个数据点时,学到的两个classifier的差异,如果差异很小,则是 stable algorithm
Bound
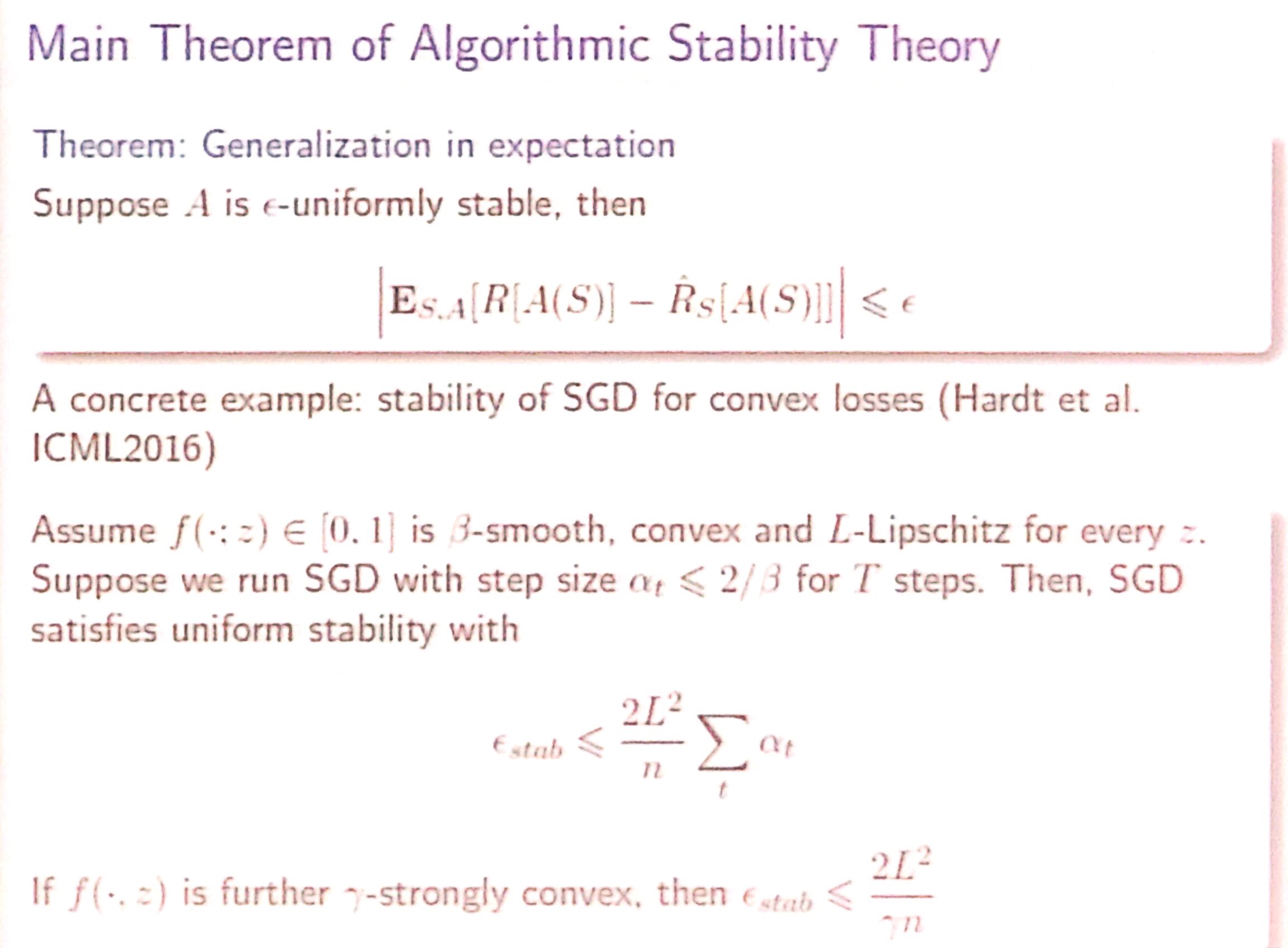
stable 的学习算法学习到的模型有很好的泛化误差
Mystery of DL
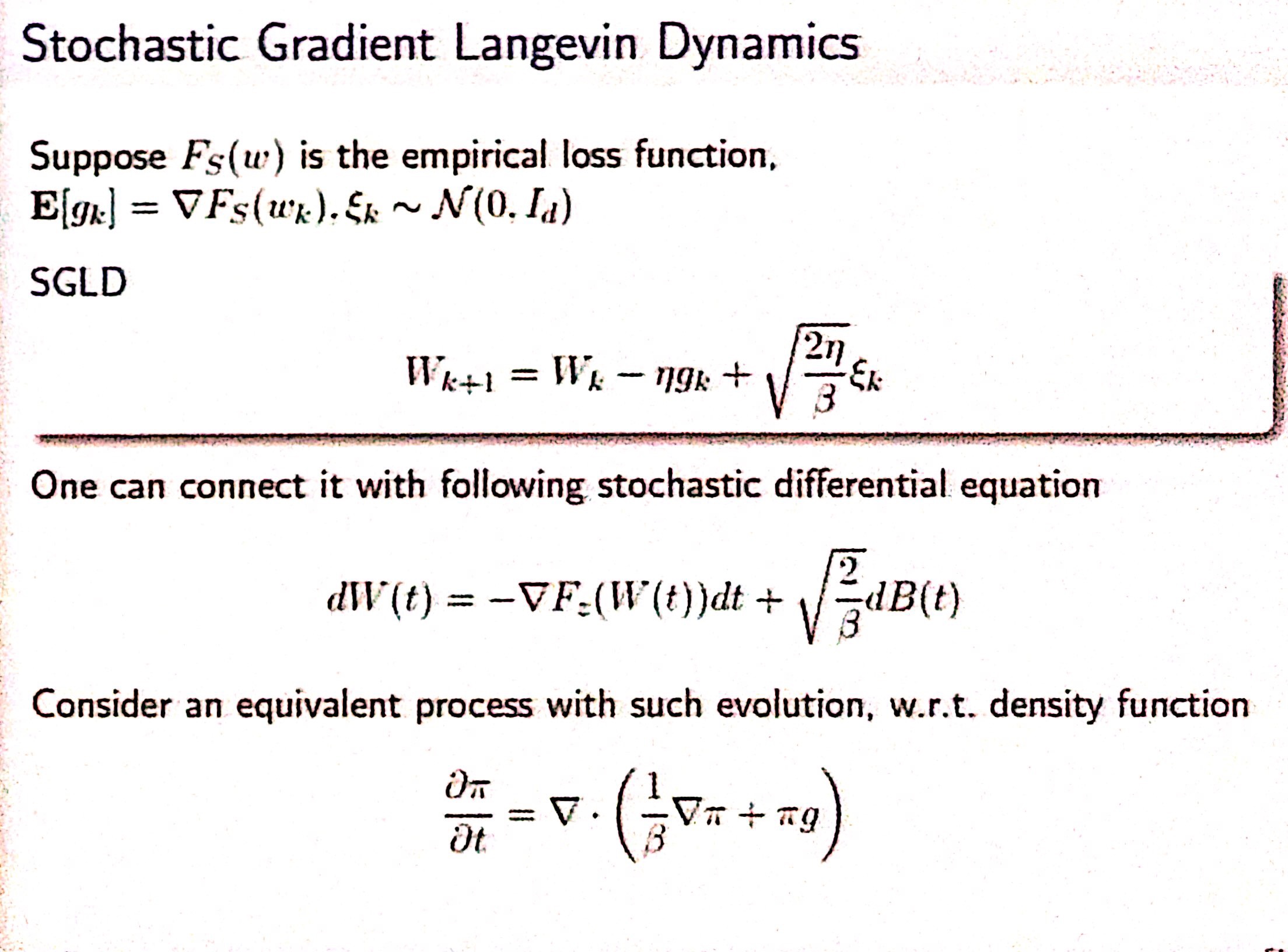
SGLD的分析
Liwei Wang 老师小组的工作
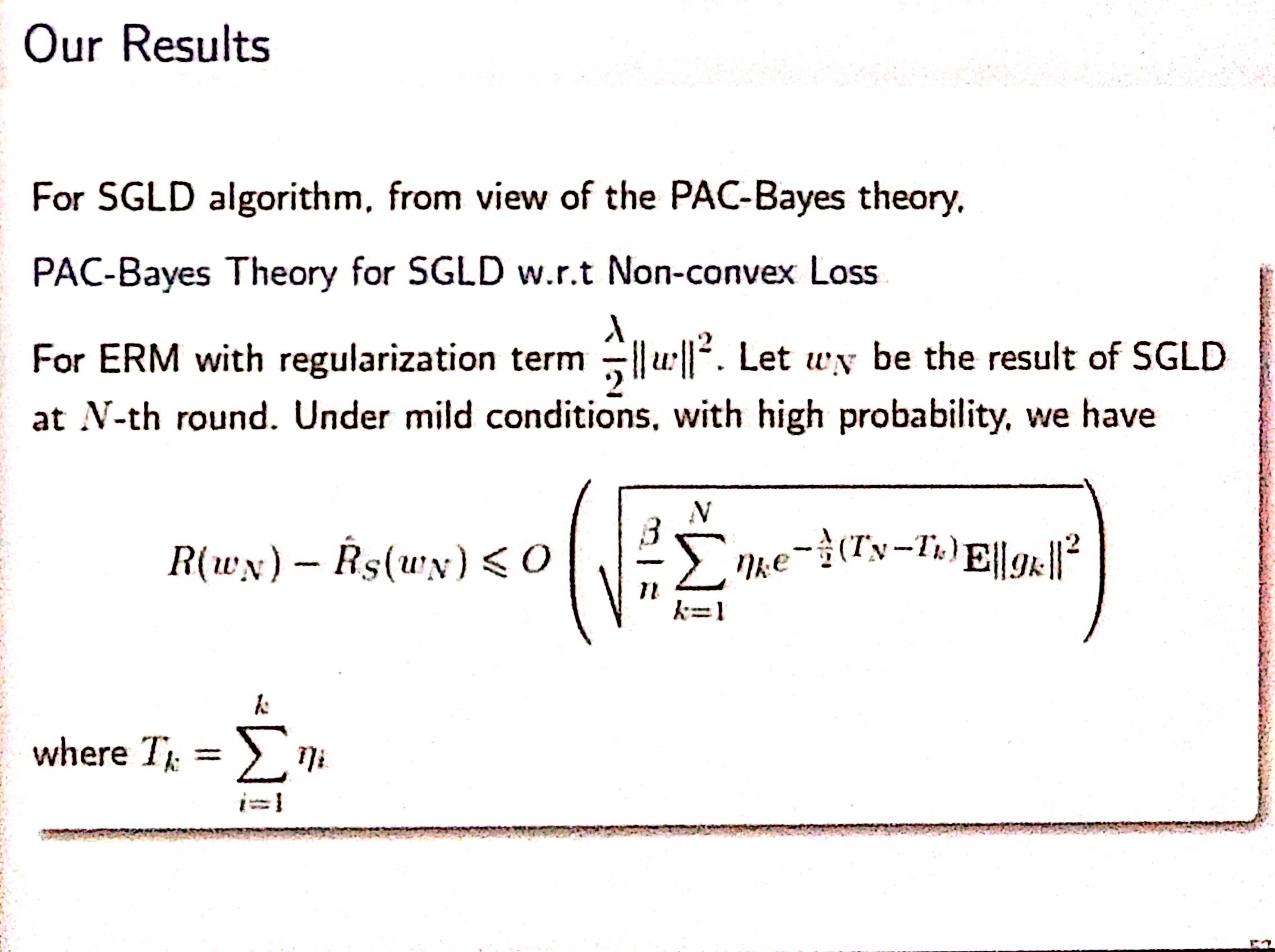
结论:
无论 DNN 多复杂,如果 SGD 训练不是很长,那么就有比较好的 generalization bound
训练时间长,如果大部分时间在一个比较平坦的优化区域,也能有比较好的 generalization bound
参考文献